


"Range and Accuracy in Autonomous Vehicles" (Post Four)
- tsephel123
- May 9, 2021
- 4 min read

Cruise control
You might have an autonomous vehicle (AV) without you even knowing it, with features in the latest cars like cruise control, lane-keeping assistant, lane departure warning, side view assist, etc. embedded in the system are all parts of what we call autonomous vehicles. Dr. John Long serves as the Director of Vassar’s Interdisciplinary Robotics Research Laboratory, and in one of the episodes of Robotics called Self-Driving Vehicles, Dr. Long starts by mentioning how autonomous vehicles have been in the years of making with the first automatic speed control invented in 1788 by James Watt and Mathew Boulton for steam engines. He then goes on to mention the first autopilot being commercially available in 1958 and 1986, Dickmanns’ and his team built a fully autonomous robot car that drove in tests on empty streets in Germany. Darpa’s (Defense Advanced Research Projects Administration) is a competition held annually that tests different AVs where the winner gets recognition and a huge prize but the first competition in 2004 was a let down where out of 25 AV’s, none of them made it till the end. Nonetheless, the 2005 DARPA competition was a complete turnaround where 5 AV’s completed the challenge and this was a great moment in the history of AVs where they awarded the winning robot, Stanley, a modified VW Touareg who hadn’t completed the previous year led by Sebastian Thrun and SAIL team. How did they do it? Did they have a strategy behind it?

DARPA 2004, Sandstorm flip out
Well, before we dive into the questions, my initial thoughts of AV’s have always been positive and that AV’s were going to be the next big addition to our society making everyone's life easier but upon deepening my analysis and conducting extensive research, the issue that I’m having is that while autonomous vehicles can operate safely on public roads where there are instructions to follow for the car, how will it handle other settings that don't have roads and or GPS working? With that question constantly creeping in the back of my head, I started to think that there is no way AV’s can operate in different terrains such as off-road, desert, and snow where there won’t be lines to follow and GPS to navigate, but that’s when I came across Dr. Longs episode of Autonomous Vehicle where he mentioned Stanley, a modified VW Touareg, who had done the unthinkable and completed the DARPA competition held in 2005 in the terrain that I mentioned before like offroading.

Winner Stanley, DARPA competition 2005
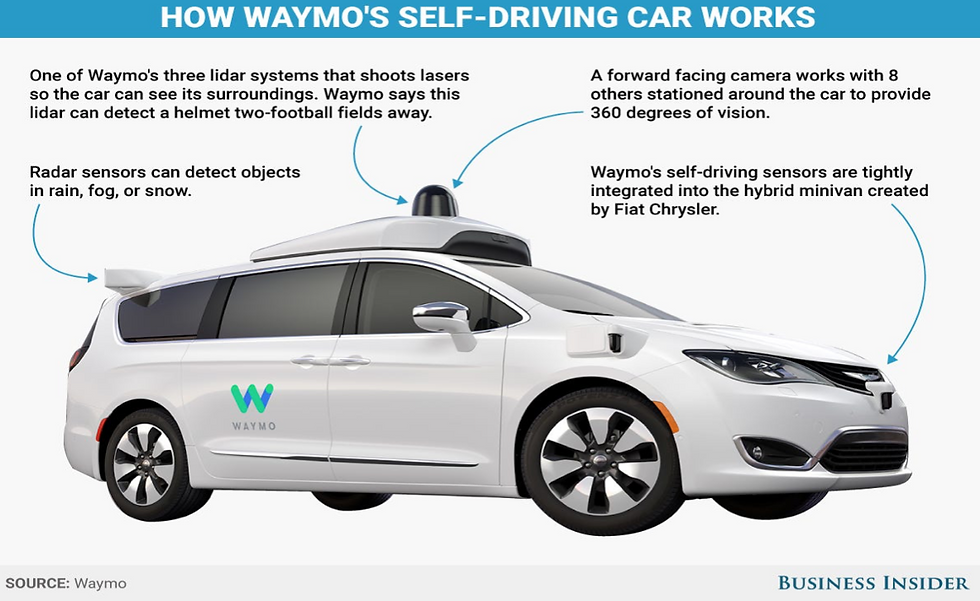
So how did Stanley manage to finish the DARPA competition? Well, in a nutshell, Dr. Long stated that their strategy was to treat Autonomous Navigation as a software problem where all of the problems faced in 2004 can be solved by building better control architecture. Dr. Long mentioned that Stanley used 3 types for short-term Navigation, staying on the path, and avoiding objects: 1)Radar - used for adaptive cruise control for keeping track of other vehicles and is insensitive to things like shadows that can throw off the video system. 2)Lidar - which can handle resolution down to “1 cm at distances up to 25 meters.” The word LIDAR is laser light, in which the sensor shines out into the world and then reads the radar-like rebound of that light to measure distance. Dr. Long further stated, “Stanley used an array of five LIDARs mounted on its roof.” 3)Video Camera - used for an optic vision that could sense out past the range of LIDAR, but closer than the radar. With 3 solutions for short-term Navigation, Dr. Long reported that Stanley's creator Sebastian Thuran and the SAIL team also had 3 different Navigational sensor systems because each involves different trade-offs between range and accuracy with “LIDAR system providing good resolution out to about 25 meters” where the camera sees further and can collect more data than an individual laser. The “Radar then senses out to 200 meters” but it provides sparser information about small features than either the camera or the laser. Last but not least, “for long-term, long-range navigation, Stanley used a GPS and a compass” as reported by Dr. Long.
Now as far as Stanley's software goes, Dr. Long reported what software controller modules were used by Sebastian Thuran and the SAIL team and the first one being a data acquisition module where it collects and converts raw sensors into the first approximation of meaningful information. The planning module was in the middle and it collected data continuously from all of the sensor systems, adjudicates differences in sensor opinions based on a probability derived from using and comparing these sensors and then plots a safe course to the next waypoint. The last module was the World model module which handled the movement of the car for it to drive safely. For robots operating off-road, the world model relies on a map that Stanley has created in real-time as it drives. The example that Dr. Long used was “if a turn has to be made, the world model understands how Stanley handles under the conditions at hand and then adjusts speed and steering so that Stanley drives under control.”
In conclusion, after deepening my analysis, my stance on Autonomous vehicles remains the same in that they, will succeed and we will all benefit from it making our life easier. Stanley was able to treat the autonomous navigation of a vehicle in the desert as a software problem and the design of 3 module controllers, combined with estimating uncertainty and machine learning, were keys to the game that allowed Stanley to finish the 132 miles off-road course and win the race. With such a boost to the whole AV sector, Dr. Long mentioned that “they took what they learned from Stanley and inserted it in google Driverless cars.” While the number of deaths from automobile accidents continues to trend downward as we have added safety features like seat belts, airbags, and anti-lock brakes, tens and thousands of people still die every year from vehicle accidents. Millions more are injured. The promise of driverless cars, trains, and buses with even more automation would reduce further these deaths and injuries. And although there will be more cars on the road due to people who usually don’t go out due to reasons will use AV’s as their way of transportation, there will be fewer accidents due to uniform movement of AV which will, in turn, reduce traffic significantly.


Comments